01
01 
Qué es Aranzadi
La Sociedad de Ciencias Aranzadi cuenta en la actualidad con 2000 personas asociadas de las cuales cerca de 150 corresponden a investigadores e investigadoras de diferentes disciplinas científicas, que desarrollan sus tareas de investigación en el ámbito de esta entidad.
Se trata de una Sociedad que facilita la conservación y puesta en valor del patrimonio científico, histórico y cultural como referencia para entender la evolución de la sociedad moderna en la que vivimos.
Nuestros objetivos
-
Promover la investigación, tanto básica como aplicada, de las Ciencias naturales y humanas.
-
Conocer, valorar y proteger nuestro entorno y patrimonio.
-
Promover la participación y voluntariado a través de iniciativas de ciencia ciudadana.
Departamentos

Ciencias humanas y sociales
 01
01  02
02  03
03  04
04 
Ciencias naturales

 05
05  06
06  07
07  08
08  09
09 







Nuestra trayectoria

1947
Creación del “Grupo Aranzadi de Ciencias Naturales”

1948
Sede en el Museo de San Telmo
1949
Creación de la revista Munibe
1953
Creación del boletín Aranzadiana

1954
I Campaña de Anillamiento en Doñana (Ornitología)
1955
Primer descenso a la sima de Aitzbeltz (Espeleología)
1962
Descubrimiento de las pinturas rupestres de Altxerri (Arqueología Prehistórica)
1963
I Concurso de Setas de Tolosa (Micología)
1969
Descubrimiento de las pinturas rupestres de Ekain (Arqueología Prehistórica)

1977
Sede en la Torre de Arbide
1983
I volumen del Atlas Etnolingüístico de Euskal Herria (Etnografía)

1997
Sede en Zorroaga
1999
Publicación de “Claves ilustradas de la flora del País Vasco y territorios limítrofes” (Botánica)

2000
Inicio de la exhumación de fosas de la Guerra Civil (Antropología Física)

2005
Inauguración del Museo de los dinosaurios en Igea (La Rioja) (Geología)
2012
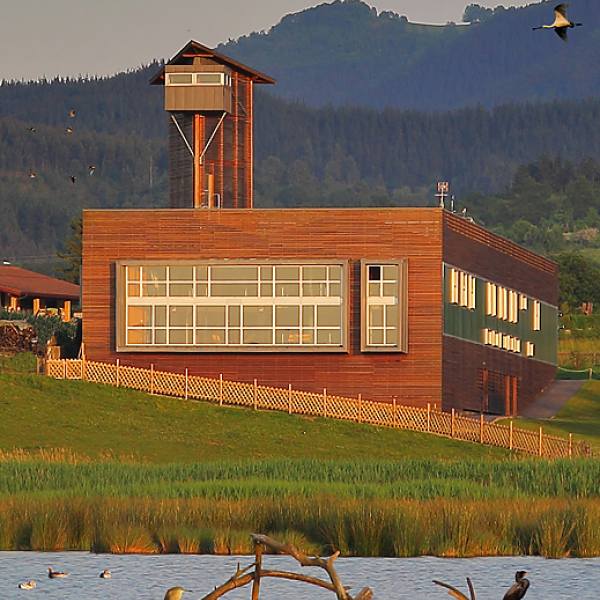
Inauguración del Urdaibai Bird Center (Ornitología)
2022
75 aniversario de la Sociedad de Ciencias Aranzadi

2022
Descubrimiento de la Mano de Irulegi
Estatutos y memorias anuales
Estatutos de la sociedad (pdf, 4.76 MB)







2009
2008
2007
2006
2005